作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
后投影算法(Backprojection Algorithm)可以应用于穿墙雷达,帮助实现对墙壁背后的目标进行定位和成像。以下是基于后投影算法的穿墙雷达成像的基本过程:
需要注意的是,穿墙雷达成像面临的挑战包括墙壁衰减、多径效应、杂散回波等。因此,在际应用中可能需要采用多种技术来克服这些问题,如时频纠正、多普勒校正、多径抑制等。此外,选择适当的信号处理和成像算法也会影响成像性能和灵敏度。
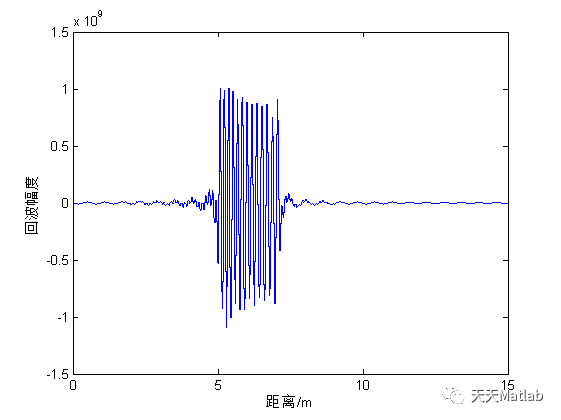
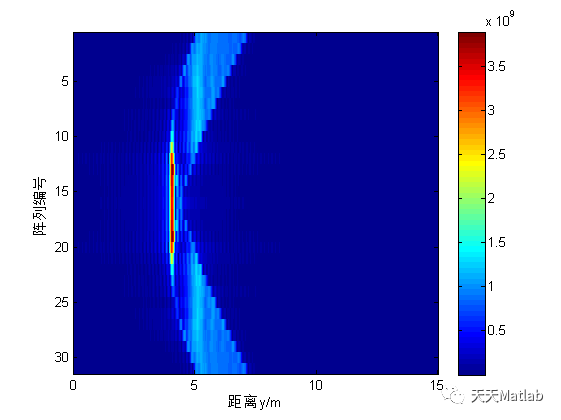
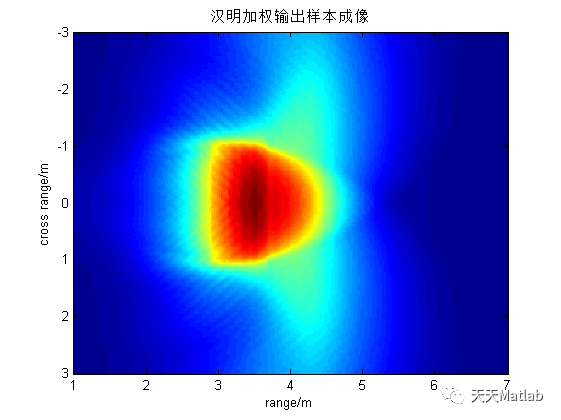
该程序在墙后建立了长为2米,宽为0.6米的矩形,利用后投影算法以及快速时延估计进行成像。并且计算最佳带宽,最佳中心频率,阵列天线数量,陈列天线间隔。使得成像质量很好。缺点在于:计算量偏大。
clear all;close all;clc;%%====== 参数设置 =====%%=== 成像区域 ========L_width=6; W_width=6;LL=128*2;WW=128*2;xx=linspace(-W_width/2,W_width/2,WW);%纵轴在-3到3之间划分128*2个点x=linspace(-W_width/2,W_width/2,WW*2);%墙离散成点,用于遍历yy=linspace(1,L_width+1,LL);%在横轴0-6之间划分256个点%%=== 发射信号参数 ======c=3.0e8;B_width=(1)*10^9;%带宽fc=(0.75)*10^9; %载频tRange=10e-8; %脉冲持续时间Rmax=tRange*c/2; %脉冲最远传播距离nT=1024*1;%采样点数fs=nT/tRange;%采样频率t=linspace(0,tRange,nT); %时间划分%%=== 墙壁设置====d=0.24;e_content=8.6;%%=== 阵列参数 =======单发单收N_line=31;nL=linspace(-W_width/2,W_width/2,N_line);%天线位置,-1.5-1.5,划分31% yL=-d;%%=== 目标位置 ======x_tag = linspace(-1,1,13); %设置目标长度,要使得以最小分辨率增长% y_tag=2*tan((90-30/2)*pi/180);tN=length(x_tag); %目标个数immage=zeros(WW,LL); %初始化成像矩阵for i = 0:c/(2*B_width):0.6 %c/(2*B_width)为间隔最小分辨距离, i为每次y增加长度 y_tag = linspace(3+i,3+i,13); %设置目标的宽度 %%%========== 回波信号 ========== pulse=zeros(N_line,nT); %初始化天线采样数据 for kk=1:tN %目标数目 for k=1:N_line %天线阵列 %全遍历 l11=sqrt((x_tag(kk)-x).^2+(y_tag(kk)).^2); l22=sqrt((nL(k)-x).^2+d.^2); r_x=sqrt(e_content)*l22+l11; r=min(r_x); %t_delay=2*r/c; t_delay1= wall_delay(x_tag(kk),y_tag(kk),nL(k),d,e_content); end%成像figure(3);imagesc(yy,xx,abs(immage));ylabel('cross range/m');xlabel('range/m');title('汉明加权输出样本成像');
Copyright © 2023 leiyu.cn. All Rights Reserved. 磊宇云计算 版权所有 许可证编号:B1-20233142/B2-20230630 山东磊宇云计算有限公司 鲁ICP备2020045424号
磊宇云计算致力于以最 “绿色节能” 的方式,让每一位上云的客户成为全球绿色节能和降低碳排放的贡献者

