作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
二阶一致性是指多个系统或智能体在互相交流和协作的过程中,不仅能够达到一致的目标状态,还能够保持彼此的速度和加速度达到一致。简而言之,它要求系统在目标一致性上,以及速度和加速度一致性上都达到协调。
具体来说,二阶一致性原理可以描述为以下两个:
二阶一致性原理在多智能体系统、群体机器人、无人机编队等领域有广泛应用。通过确保系统之间的目标和运动协调,可以实现适应性、合作和集体行为,提高系统的性能和效率。
实现二阶一致性涉及到分布式控、通信协议和算法设计等方面的技术。常用的方法包括分布式协同控制、一致性算法(如一致性协议或共识算法)、信息交换和合作机制等。
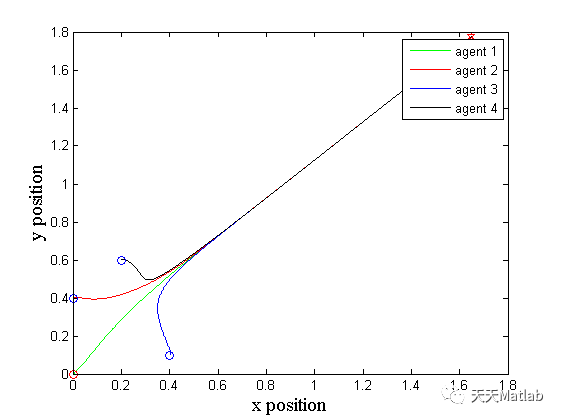
基于二阶一致性的无领导多无人机协同编队控制可以通过以下步骤实现:
需要注意的是,无领导多无人机协同编队控制中涉及到通信、邻居选择、障碍物避障等复杂问题。此外,实际应用中可能还需要考虑安全性、鲁棒性和动态环境等因素,并结合其他技术如路径规划、目标跟踪等来实现具体任务需求。最终的控方案应根据具体应用场景和编队要求进行定制。
clc
clear
close all
t0=0;tf=15;
step_qw=0.01;
p1=20;Y=0.1;M=0.15;N=0.275;
q0=[0.0; 0.0; 0.1; 0.1;
0.0; 0.4; 0.1; 0.1;
0.4; 0.1; 0.1; 0.1;
0.2; 0.6; 0.1; 0.1];
%save('q0.mat','q0');
load('q0.mat','q0');
[t,q]=ode45('Whole_Twodimension_total_state',t0:step_qw:tf,q0);
figure(1);
hold on
xlabel('x position','FontName','Times New Roman','FontSize',14);ylabel('y position','FontName','Times New Roman','FontSize',14);
plot(q(:,1),q(:,2),'g');
hold on
plot(q(:,5),q(:,6),'r');
hold on
plot(q(:,9),q(:,10),'b');
hold on
plot(q(:,13),q(:,14),'k');
hold on
legend('agent 1','agent 2','agent 3','agent 4');
plot(q(1,1),q(1,2),'ro');
hold on
plot(q(1,5),q(1,6),'bo');
hold on
plot(q(1,9),q(1,10),'bo');
hold on
plot(q(1,13),q(1,14),'bo');
hold on
plot(q(end,1),q(end,2),'rp');
hold on
box on
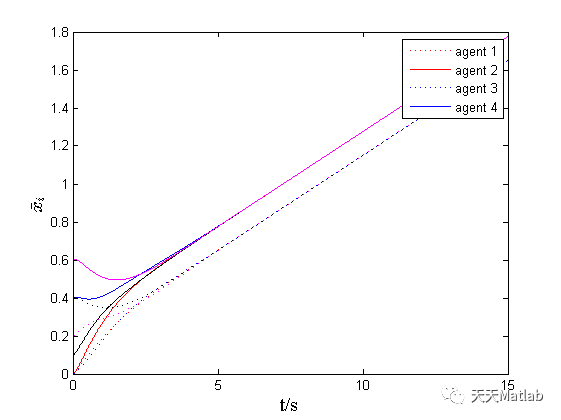
figure(2)
hold on
xlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('$\bar{x}_i$','interpreter','latex','fontsize',14);
hold on
plot(t,q(:,1),'r:',t,q(:,2),'r');
hold on
plot(t,q(:,5),'b:',t,q(:,6),'b');
hold on;
plot(t,q(:,9),'k:',t,q(:,10),'k');
hold on;
plot(t,q(:,13),'m:',t,q(:,14),'m');
hold on
legend('agent 1','agent 2','agent 3','agent 4');
box on
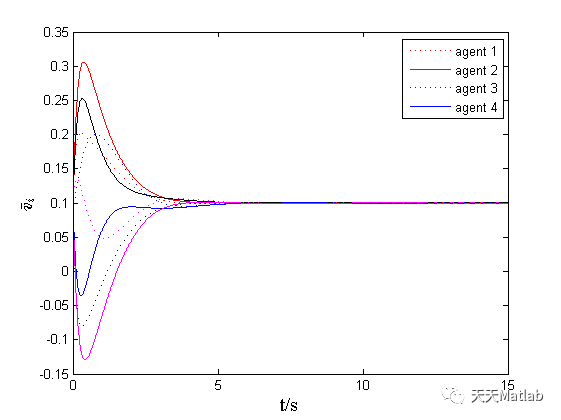
figure(3)
hold on
xlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('$\bar{v}_i$','interpreter','latex','fontsize',14);
hold on
plot(t,q(:,3),'r:',t,q(:,4),'r');
hold on
plot(t,q(:,7),'b:',t,q(:,8),'b');
hold on;
plot(t,q(:,11),'k:',t,q(:,12),'k');
hold on;
plot(t,q(:,15),'m:',t,q(:,16),'m');
hold on
legend('agent 1','agent 2','agent 3','agent 4');
box on
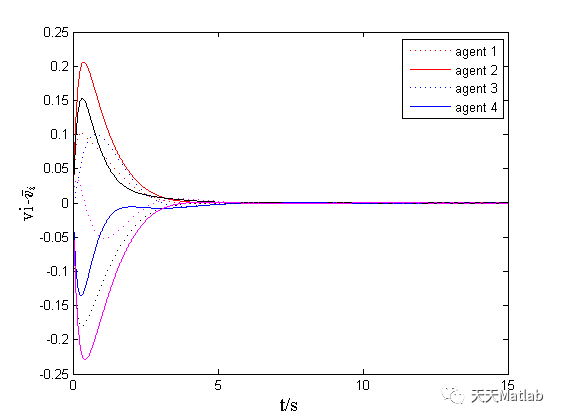
figure(4)
hold on
xlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('vi-$\bar{v}_i$','interpreter','latex','fontsize',14);
hold on
plot(t,q(:,3)-Y,'r:',t,q(:,4)-Y,'r');
hold on
plot(t,q(:,7)-Y,'b:',t,q(:,8)-Y,'b');
hold on;
plot(t,q(:,11)-Y,'k:',t,q(:,12)-Y,'k');
hold on;
plot(t,q(:,15)-Y,'m:',t,q(:,16)-Y,'m');
hold on
legend('agent 1','agent 2','agent 3','agent 4');
box on
%figure(4)
%hold on
%xlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('','interpreter','latex','fontsize',14);
%hold on
%plot(t,q(:,1)-M,'r:',t,q(:,2)-N,'r');
%hold on
%plot(t,q(:,5)-M,'b:',t,q(:,6)-N,'b');
%hold on;
%plot(t,q(:,9)-M,'k:',t,q(:,10)-N,'k');
%hold on;
%plot(t,q(:,13)-M,'m:',t,q(:,14)-N,'m');
%hold on
%box on
grid off
[1] 熊涛,曹科才,柴运,等.基于输入约束一致性算法的多无人机编队控制[J].计算机工程与应用, 2018, 54(12):7.DOI:10.3778/j.issn.1002-8331.1704-0458.
[2] 马培蓓,雷明,纪军.基于一致性的多无人机协同编队设计[J].战术导弹技术, 2017(2):5.DOI:10.16358/j.issn.1009-1300.2017.02.15.
[3] 吴宇,梁天骄.基于改进一致性算法的无人机编队控制[J].航空学报, 2020.DOI:10.7527/S1000-6893.2020.23848.
Copyright © 2023 leiyu.cn. All Rights Reserved. 磊宇云计算 版权所有 许可证编号:B1-20233142/B2-20230630 山东磊宇云计算有限公司 鲁ICP备2020045424号
磊宇云计算致力于以最 “绿色节能” 的方式,让每一位上云的客户成为全球绿色节能和降低碳排放的贡献者

