作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
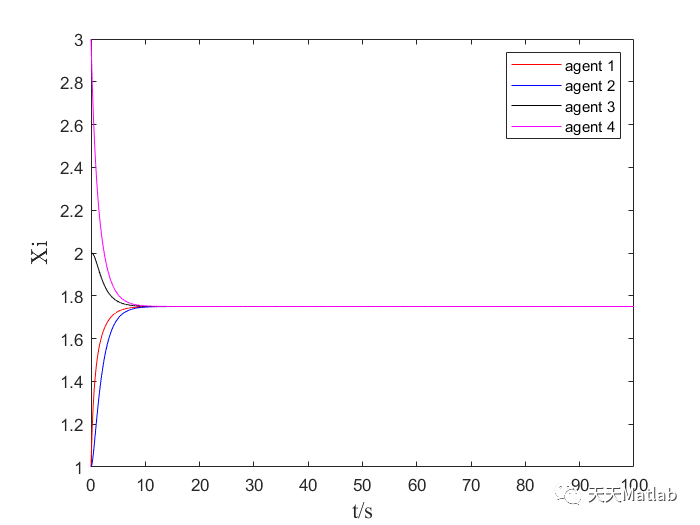
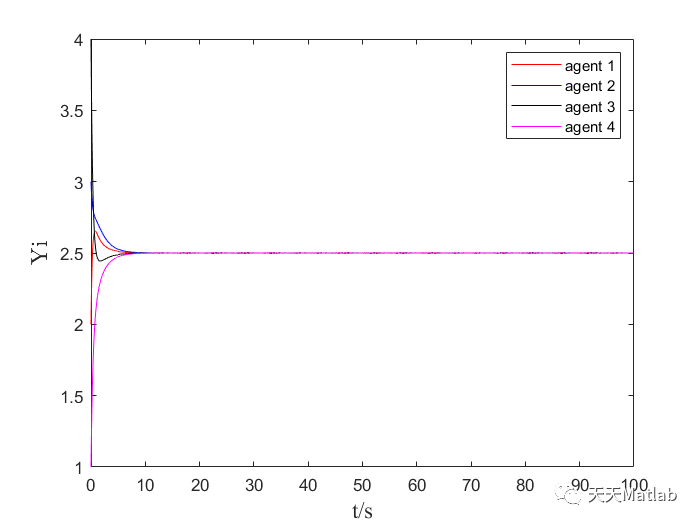
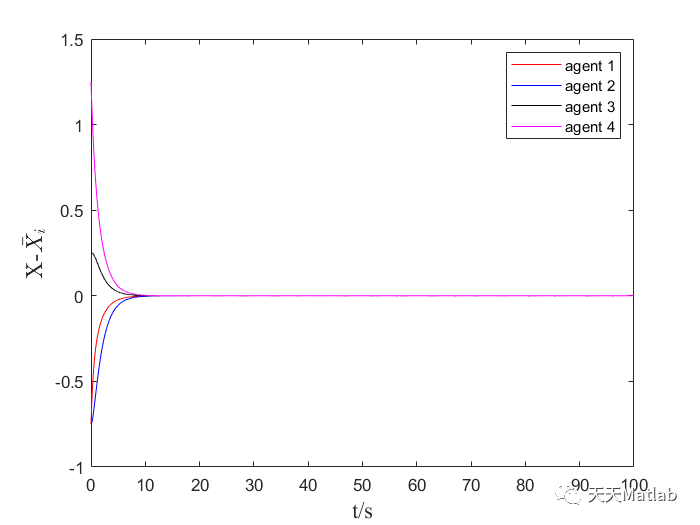
基于一阶一致性的无领导多无人机协同编队控制是一种方法,通过使无人机之间的状态保持一致来实现编队控制,而无需明确的领导者。下面是一个基本的步骤框架:
需要注意的,实现无多无人机协同编队控制是一个复杂的任务,需要考虑许多因素,如通信延迟、不确定性、碰撞避免和编队形状等。此外,适当的传感器和导航系统可能也需要集成到系统中。
以上提供的步骤框架仅是一个基本指导,并且可以根据具体要求进行调整和改进。在实际应用中,深入研究算法细节、建模精确性和控制策略对编队效果的影响是非常重要的。
clcclearclose allt0=0;tf=100; step_qw=0.01;p1=20;M=1.75;N=2.5; q0=[1; 2;1; 3;2; 4; 3; 1];save('q0.mat','q0');% load('q0.mat','q0'); [t,q]=ode45('Whole_Twodimension_total_state',t0:step_qw:tf,q0);figure(1);hold onxlabel('x position','FontName','Times New Roman','FontSize',14);ylabel('y position','FontName','Times New Roman','FontSize',14);plot(q(:,1),q(:,2),'g');%legend('agent 1',4);hold onplot(q(:,3),q(:,4),'r');hold onplot(q(:,5),q(:,6),'b');hold onplot(q(:,7),q(:,8),'k');hold onlegend('agent 1','agent 2','agent 3','agent 4');plot(q(1,1),q(1,2),'ro');hold onplot(q(1,3),q(1,4),'bo');hold onplot(q(1,5),q(1,6),'bo');hold onplot(q(1,7),q(1,8),'bo');hold onplot(q(end,1),q(end,2),'rp');hold onbox onfigure(2)hold onxlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('Xi','interpreter','latex','fontsize',14);hold onplot(t,q(:,1),'r-');hold onplot(t,q(:,3),'b-');hold on;plot(t,q(:,5),'k-');hold on;plot(t,q(:,7),'m-');hold onlegend('agent 1','agent 2','agent 3','agent 4');box onfigure(3)hold onxlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('Yi','interpreter','latex','fontsize',14);hold onplot(t,q(:,2),'r');hold onplot(t,q(:,4),'b');hold on;plot(t,q(:,6),'k');hold on;plot(t,q(:,8),'m');hold onlegend('agent 1','agent 2','agent 3','agent 4');box onfigure(4)hold onxlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('X-$\bar{X}_i$','interpreter','latex','fontsize',14);hold onplot(t,q(:,1)-M,'r');hold onplot(t,q(:,3)-M,'b');hold on;plot(t,q(:,5)-M,'k');hold on;plot(t,q(:,7)-M,'m');hold onlegend('agent 1','agent 2','agent 3','agent 4');box onfigure(5)hold onxlabel('t/s','FontName','Times New Roman','FontSize',14);ylabel('Y-$\bar{Y}_i$','interpreter','latex','fontsize',14);hold onplot(t,q(:,2)-N,'r');hold onplot(t,q(:,4)-N,'b');hold on;plot(t,q(:,6)-N,'k');hold on;plot(t,q(:,8)-N,'m');hold onbox onlegend('agent 1','agent 2','agent 3','agent 4'); grid off
[1] 马培蓓,雷明,纪军.基于一致性的多无人机协同编队设计[J].战术导弹技术, 2017(2):5.DOI:10.16358/j.issn.1009-1300.2017.02.15.
[2] 熊涛,曹科才,柴运,等.基于输入约束一致性算法的多无人机编队控制[J].计算机工程与应用, 2018, 54(12):7.DOI:10.3778/j.issn.1002-8331.1704-0458.
[3] 吴宇,梁天骄.基于改进一致性算法的无人机编队控制[J].航空学报, 2020.DOI:10.7527/S1000-6893.2020.23848.
Copyright © 2023 leiyu.cn. All Rights Reserved. 磊宇云计算 版权所有 许可证编号:B1-20233142/B2-20230630 山东磊宇云计算有限公司 鲁ICP备2020045424号
磊宇云计算致力于以最 “绿色节能” 的方式,让每一位上云的客户成为全球绿色节能和降低碳排放的贡献者

