作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
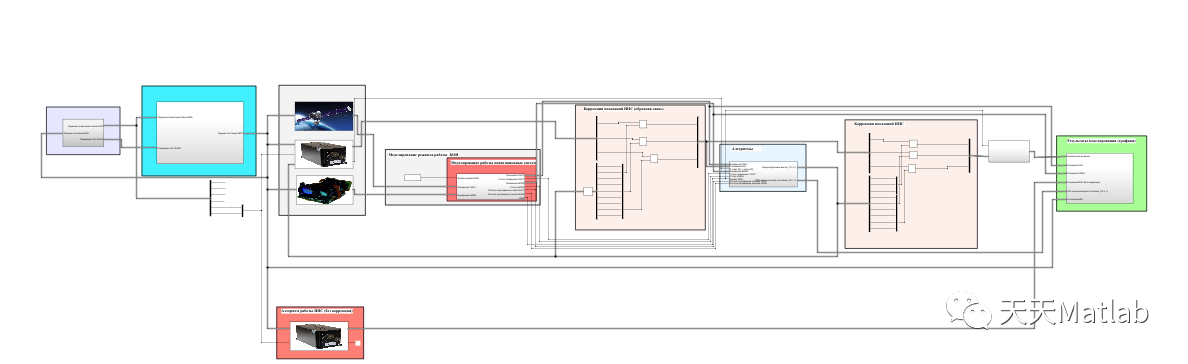
无人机导航系统是指用于实现无人机飞行导航、位置定位和路径规划的集成系统。它通常由以下几个组件构成:
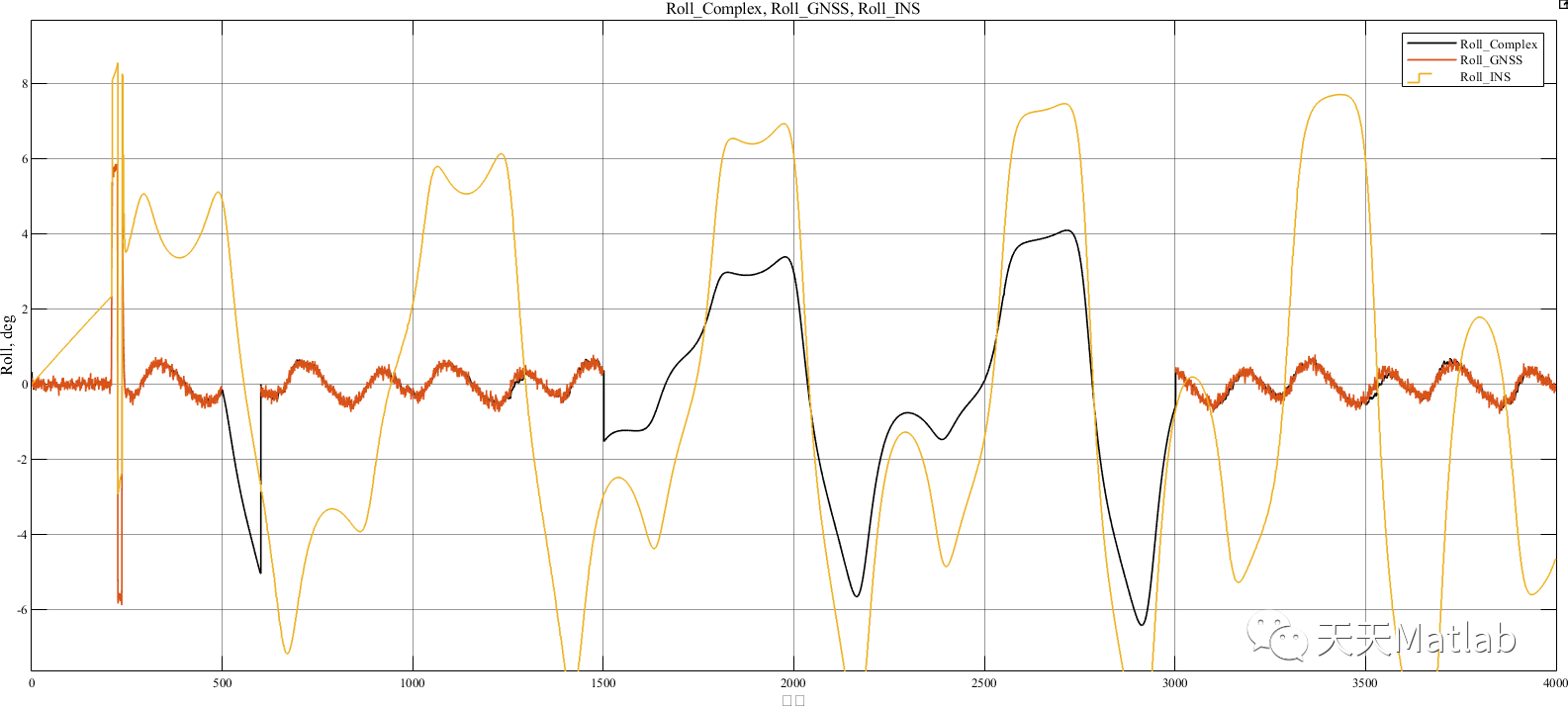
function out1 = UAVOrientationPlot(NameUAV, out)% Функция, предназначенная для построения графиков угловой ориентации и показаний ДУСов БпЛА% и сохранение результатов в файл .fig.% Запуск после окончания моделирования модели% UAVIntegratedNavigationSystem.slx% NameUAV - строка с названием БпЛА.%% Размер шрифта по осям %%set(0,'DefaultAxesFontSize', 12);%% Построение графиков угла крена БпЛА %%fig1=figure;plot(out.Roll_Complex.time,out.Roll_Complex.data);hold on;plot(out.Roll_GNSS.time,out.Roll_GNSS.data);hold on;plot(out.Roll_INS.time,out.Roll_INS.data);grid on;title('Угол крена БпЛА' + " " + string(NameUAV),'FontSize',16);legend('Угол Крена - Комплексное решение',... 'Угол Крена - Навигационное решение по СНС',... 'Угол Крена - Навигационное решение по ИНС',... 'FontSize', 12, 'Location','northwest');xlabel('Время, сек', 'FontSize', 12);ylabel('Угол Крена, град', 'FontSize', 12);saveas(fig1, "Угол Крена БпЛА" + " " + string(NameUAV) + " " + ".fig");close;%% Построение графиков угла курса БпЛА %%fig1=figure;plot(out.Yaw_Complex.time,out.Yaw_Complex.data);hold on;plot(out.Yaw_GNSS.time,out.Yaw_GNSS.data);hold on;plot(out.Yaw_INS.time,out.Yaw_INS.data);grid on;title('Угол курса БпЛА' + " " + string(NameUAV),'FontSize',16);legend('Угол Курса - Комплексное решение',... 'Угол Курса - Навигационное решение по СНС',... 'Угол Курса - Навигационное решение по ИНС',... 'FontSize', 12, 'Location','northwest');xlabel('Время, сек', 'FontSize', 12);ylabel('Угол Курса, град', 'FontSize', 12);saveas(fig1, "Угол Курса БпЛА" + " " + string(NameUAV) + " " + ".fig");close;%% Построение графиков угла тангажа БпЛА %%fig1=figure;plot(out.Pitch_Complex.time,out.Pitch_Complex.data);hold on;plot(out.Pitch_GNSS.time,out.Pitch_GNSS.data);hold on;plot(out.Pitch_INS.time,out.Pitch_INS.data);grid on;title('Угол тангажа БпЛА' + " " + string(NameUAV),'FontSize',16);legend('Угол Тангажа - Комплексное решение',... 'Угол Тангажа - Навигационное решение по СНС',... 'Угол Тангажа - Навигационное решение по ИНС',... 'FontSize', 12, 'Location','northwest');xlabel('Время, сек', 'FontSize', 12);ylabel('Угол Тангажа, град', 'FontSize', 12);saveas(fig1, "Угол Тангажа БпЛА" + " " + string(NameUAV) + " " + ".fig");close;%% Построение графиков показаний ДУСов БпЛА %%fig1=figure;plot(out.AngleVelBF_X.time,out.AngleVelBF_X.data);hold on;plot(out.AngleVelBF_Y.time,out.AngleVelBF_Y.data);hold on;plot(out.AngleVelBF_Z.time,out.AngleVelBF_Z.data);grid on;title('Угловые скорости БпЛА' + " " + string(NameUAV) + " " + '(Связ. С.К.)','FontSize',16);legend('Угловая скорость БпЛА по оси OX',... 'Угловая скорость БпЛА по оси OY',... 'Угловая скорость БпЛА по оси OZ',... 'FontSize', 12, 'Location','northwest');xlabel('Время, сек', 'FontSize', 12);ylabel('Угловая скорость, град/сек', 'FontSize', 12);saveas(fig1, "Угловые скорости БпЛА" + " " + string(NameUAV) + " " + "(Связ. С.К.)" + ".fig");close;end
[1] 彭惠,熊智,刘建业,等.近空间高超声速飞行器惯性导航系统Simulink仿真研究[J].航天控制, 2012, 30(2):6.DOI:10.3969/j.issn.1006-3242.2012.02.013.
[2] 孟娜娜.高速无人机滑翔轨道导航与控制系统设计[D].大连理工大学,2013.
[3] 齐鑫,彭勤素,李丽娜,等.基于Simulink高精度组合导航系统研究与仿真[J].系统仿真学报, 2009(012):021.
Copyright © 2023 leiyu.cn. All Rights Reserved. 磊宇云计算 版权所有 许可证编号:B1-20233142/B2-20230630 山东磊宇云计算有限公司 鲁ICP备2020045424号
磊宇云计算致力于以最 “绿色节能” 的方式,让每一位上云的客户成为全球绿色节能和降低碳排放的贡献者

