作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
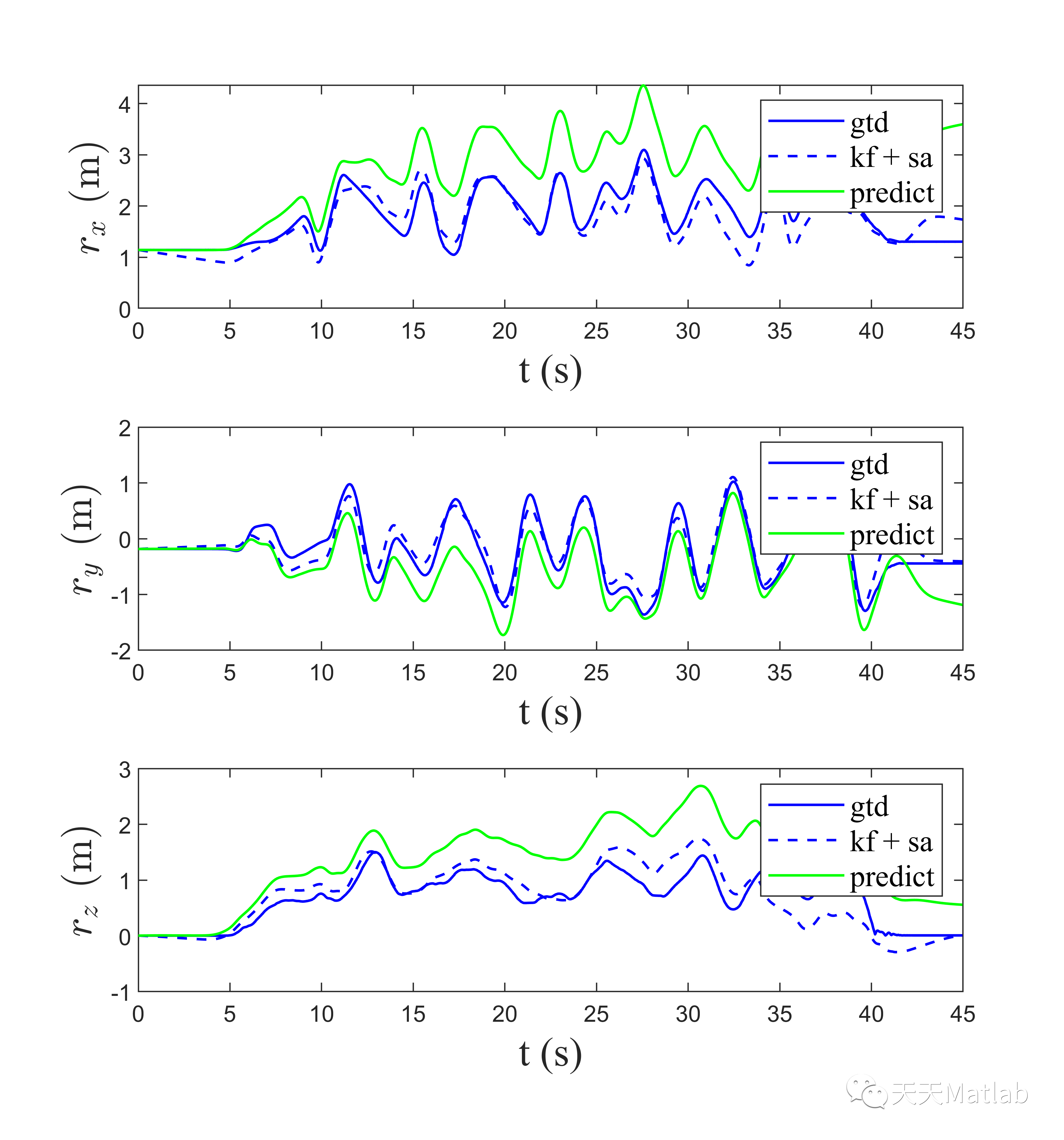
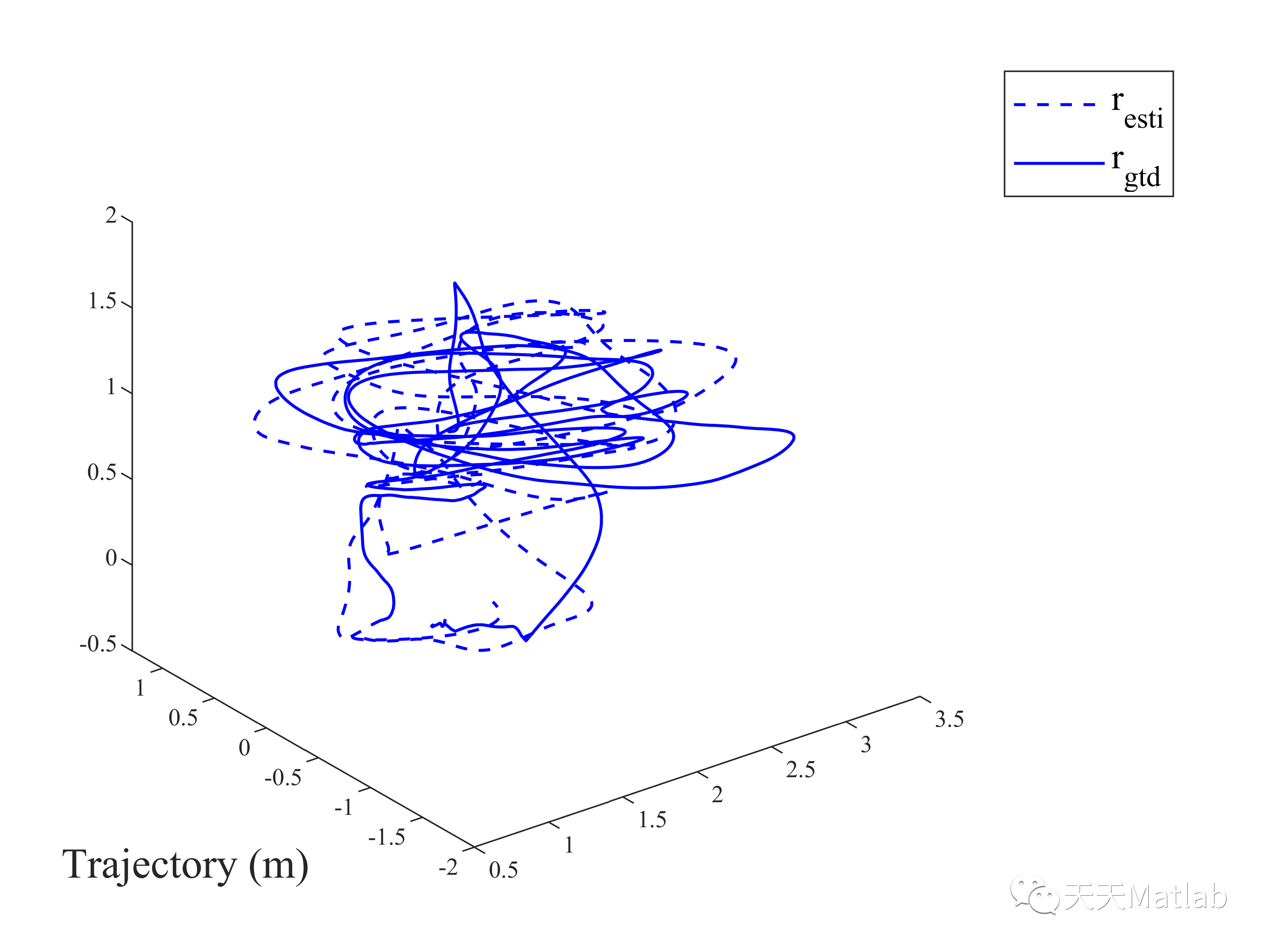
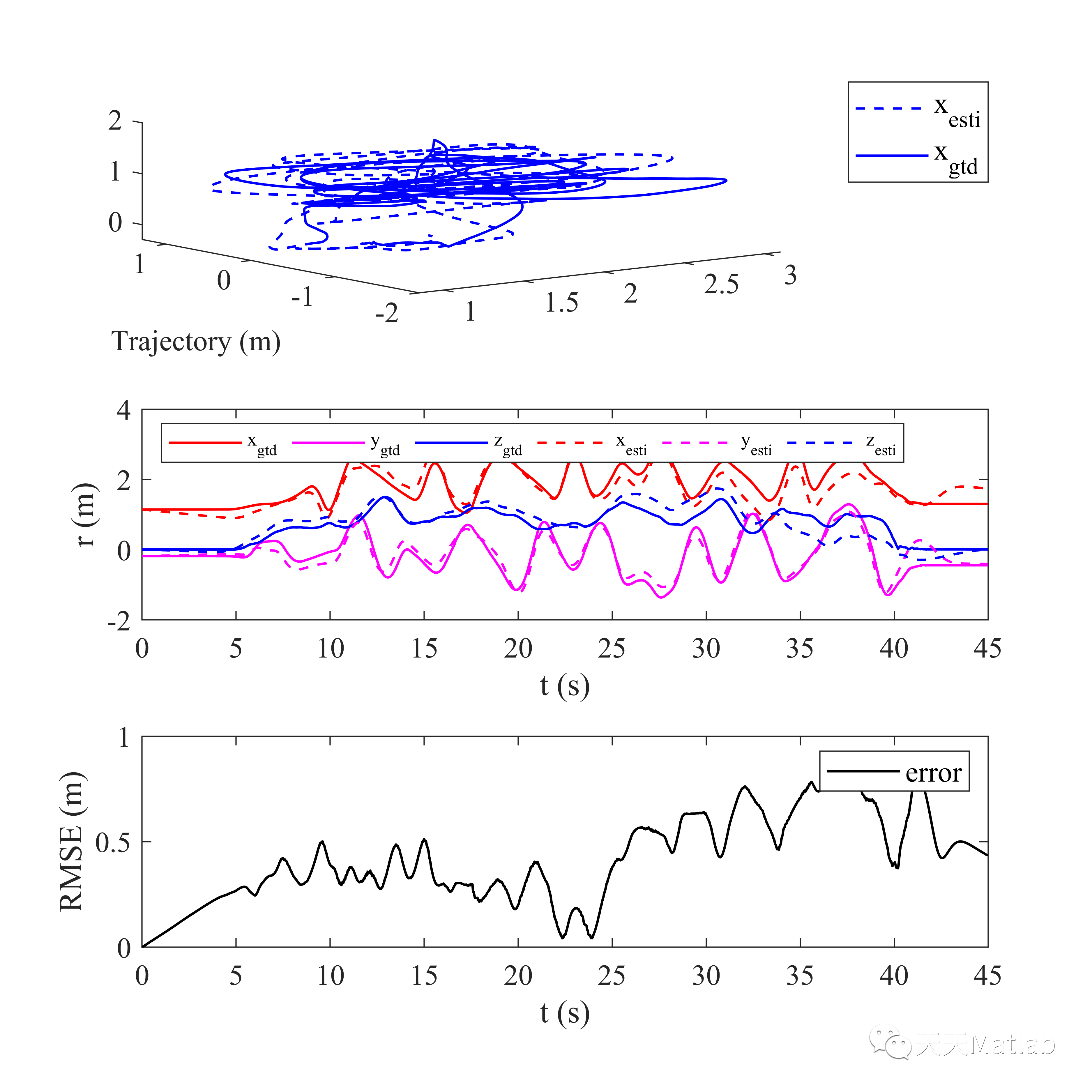
基于变分贝叶斯自适应卡尔曼滤波器(Variational Bayesian Adaptive Kalman Filter,VPAKF)实现无人机状态估计的步骤如下:
需要注意的是,VPAKF算法的具体实现可能涉及数值计算、优化技术和概率推断等方面的细节。在实际应用中,对传感器数据的质量和准确性也会影响无人机状态估计的性能。因此,基于VPAKF的无人机状态估计需要综合考虑系统设计、算法优化和数据处理等多个因素。
function [x_esti] = q_sa_sw(gtd, t, vel, uwb)% vbakf_q: The variational Bayesian adaptive Kalman filter with unknown Q.% Q: covariance of process noise% System Model:% x(k) = A x(k-1) + B u(k) + q% y(k) = H x(k) + r% State Augmentation:% z = [P', P0'B, ||B||^2, B']% Sliding Window:% periodically reset the initial measurement y0%% Data Preparation: y,v,K,dtK = length(t);dt = t(2) - t(1);v = vel;Iv = zeros(3,K);y = zeros(1,K);win_len = 25;%% Initializationbias = zeros(3,K);x_esti = zeros(8,K);x_pre = zeros(8,K);for i=1:win_len bias(:,i) = [0.053;0.000;0.010]; x_esti(:,i) = [gtd(1:3,i)', gtd(1:3,1)'*bias(:,i), norm(bias(:,i))^2, bias(:,i)']';endx_pre(:,1:win_len) = x_esti(:,1:win_len);%% x_k = A x_k-1 + B v_kA = [eye(3), zeros(3,2), -dt*eye(3); zeros(5,3), eye(5)];B = [dt*eye(3); zeros(5,3)];%% Parameterrho = 0.99;nx = 8;tau = 20;R = 1e-2;P = diag([1e-6*[1,1,1],1e-7,1e-6,1e-8*[1,1,1]]);Q0 = diag([1e-7*[1,1,1],1e-7,1e-7,1e-8*[1,1,1]]);mu = tau + nx +1;U = tau * Q0;delta = 1e-6;N = 3;%% KF_SA_SWfor i = (win_len+1):K if rem(i,win_len)==1 % reset start_i = i-1; p0 = x_esti(1:3,i-1); y0 = uwb(i-1).^2; x_esti(4,i-1) = p0' * x_esti(6:8,i-1); end Iv(1,i) = dt * trapz(v(1,start_i:i)); Iv(2,i) = dt * trapz(v(2,start_i:i)); Iv(3,i) = dt * trapz(v(3,start_i:i)); y(i) = uwb(i).*uwb(i) - y0 + (Iv(1,i)^2 + Iv(2,i)^2 + Iv(3,i)^2); % predict x_pre(:,i) = A * x_esti(:,i-1) + B * v(:,i); sigma = A * P * A'; mu = rho * (mu-nx-1) + nx + 1; U = rho * U; % update H = [2*Iv(1,i), 2*Iv(2,i), 2*Iv(3,i), -2*(i-start_i)*dt, ((i-start_i)*dt)^2, 0,0,0]; theta = x_pre(:,i); x_former = theta; for j = 1:N Aq = U./mu; % update x K = Aq * H' * ((H*Aq*H'+R)^(-1)); x = theta + K * (y(:,i) - H * theta); P = Aq - K * H * Aq; % update theta K1 = sigma * ((sigma + Aq)^(-1)); theta = x_pre(:,i) + K1 * (x - x_pre(:,i)); P1 = sigma - K1 * sigma; % update Q mu = mu + 1; U = U + (x-theta)*(x-theta)' + P + P1; if norm(x - x_former)/norm(x) < delta break; end x_former = x; end x_esti(:,i) = x;end
Copyright © 2023 leiyu.cn. All Rights Reserved. 磊宇云计算 版权所有 许可证编号:B1-20233142/B2-20230630 山东磊宇云计算有限公司 鲁ICP备2020045424号
磊宇云计算致力于以最 “绿色节能” 的方式,让每一位上云的客户成为全球绿色节能和降低碳排放的贡献者

